Time-of-Flight (ToF) Technologie
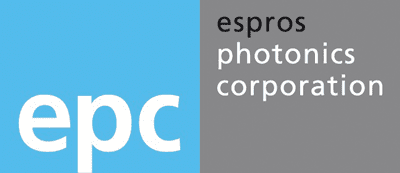
Time-of-Flight (ToF) ist eine Technologie, die in den 80er Jahren ihren Ursprung fand. Sie basiert auf der Pulslaufzeitmessung des Lichtes. Licht wird von einem Sender emittiert und von einem oder mehreren Objekten reflektiert. Die reflektierten Lichtstrahlen werden von einem Empfänger detektiert und anschließend die Entfernung ermittelt.
Einzel- oder Mehrfachpulsbetrieb
Man unterscheidet prinzipiell zwei Arten der Laufzeitmessung: Einzel- und Mehrfachpulsbetrieb. Beim Einzelpulsbetrieb wird die Zeit zwischen dem ausgesendeten und dem empfangenen Einzellichtimpuls ermittelt. Auf Grund der Konstanz der Lichtgeschwindigkeit (ca. 300 000 km/s) ist die vergangene Zeit proportional der Entfernung. Anders verhält es sich im Mehrfachpulsbetrieb: Hier wird die Phasenverschiebung zwischen ausgesendeten und empfangenen modulierten Lichtpulsen ermittelt. Auch diese entspricht einer Zeit und ist somit ebenfalls proportional der Entfernung.
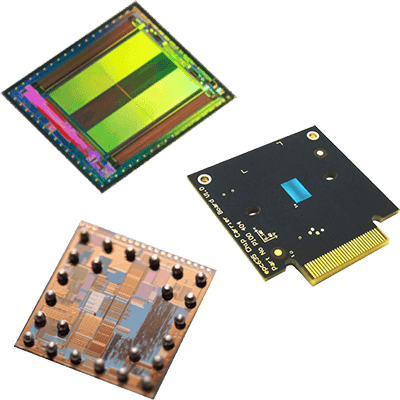
ToF Pixelgrößen
Der Aufbau eines ToF-Pixels im Silizium ist deutlich komplexer als der Aufbau eines Pixels eines Kamerachips. Bei der speziellen Chip-Technologie der ESPROS Photonics AG wurden ToF-Pixelgrößen von 20 x 20 µm realisiert. Daraus resultieren Chip-Auflösungen von bis zu 320 x 240 Pixeln (QVGA). Mit dieser Auflösung lassen sich nicht nur Entfernungen messen, sondern auch Objekte oder Gesten erkennen. Hiermit sind komplexe Messaufgaben umsetzbar, wie z. B. Gerätesteuerung über Gesten, Überwachung und intelligente Steuerung von Aufzügen und Rolltreppen, Kontrollen von Sicherheitsbereichen um Roboter und kostengünstige Realisierung fahrerloser Transportsysteme. Die ToF-Chips der ESPROS Photonics AG sind als CSP/BGA (Chip Scale Package/Ball Grid Array) ausgeführt und weisen eine Dicke von nur ca. 50 µm auf. Damit lassen sich weitaus kleinere und kompaktere Sensorsysteme entwickeln, als dies in den Anfängen der ToF-Technologie möglich war.
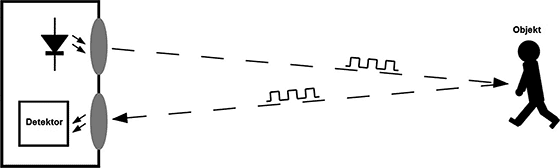
Prinzip der Entfernungsmessung
Bei einem ToF-System müssen Optik, Hard- und Software-Design in geeigneter Weise zusammenspielen. Zunächst muss die maximale Entfernung zum Messobjekt definiert sein. Beim Mehrfachpulsbetrieb steht eine komplette 360°-Phase für die maximale, eineindeutige Entfernung zur Verfügung. Ein Beispiel: Die 360° entsprechen einer maximalen Entfernung von 15 m, gleichbedeutend mit einer definierten Modulationsfrequenz (1/tMOD). Der ToF-Chip liefert 4 Abtastwerte, sogenannte DCSx, die jeweils um 90°-Phasen vorschoben sind. Aus diesen Abtastwerten kann sowohl die Amplitude (Signalqualität) als auch die Entfernung berechnet werden. Die Ausgabe der 4 DCSx-Werte erfolgt für jedes der Pixel. Bis zu 15 m lassen sich die Entfernungen eineindeutig bestimmen. Steht das Objekt aber in einer Entfernung von 16 m, kann das ToF-System die Entfernung nicht eineindeutig ermitteln und zeigt eine Entfernung von 1 m = 16 m – 15 m an.
Lichtmenge
Ein weiterer Aspekt ist das Sichtfeld (FOV: Field of View) des ToF-Kamerasystems. In der Regel ist nicht die Empfindlichkeit des ToF-Chips die kritische Größe, sondern vielmehr die Menge an ausgesandtem Licht. Das Sendemodul muss ausreichend Licht für die Reflektion in den Empfänger liefern. Dabei gilt: Je größer die Entfernung und das Sichtfeld, desto größer ist die Menge an Licht, die zur Detektion des Objektes notwendig ist. Da es sich um ein optisch messendes System handelt, ist auch die Laserklasse zu berücksichtigen, wenn Personen in das Sichtfeld des Kamerasystems treten können.
Einflussgrößen des Messobjekts
Einfluss auf das Messergebnis haben natürlich auch die Beschaffenheit, der Reflektionsgrad und die Geschwindigkeit des Objektes. Es gibt stark und schwach reflektierende Materialien. Wird das Licht vom Objekt zu schwach reflektiert, kann dieses nur schwer oder gar nicht erkannt werden. Dies muss in der Designphase durch entsprechend gewählte Integrationszeiten berücksichtigt werden. Eine hohe Bewegungsgeschwindigkeit des Objektes bedingt eine ausreichend hohe Rechenleistung bzw. die Wahl eines geeigneten Controllers, der die Messwerte ausreichend schnell verarbeitet und aussagekräftige Ergebnisse liefert. Aufnahmen von langsamen oder ruhenden Objekten sind wesentlich einfacher zu verarbeiten.
Störeinflüsse
Werden ToF-Systeme beispielsweise im Inneren eines Gebäudes eingesetzt, sind Umwelteinflüsse nicht zu berücksichtigen. Im Außeneinsatz sind allerdings geeignete Maßnahmen in der Hard- und auch Software vorzunehmen. Starkes Sonnenlicht kann durch die integrierte „Ambient Light Suppression“ (Umge-bungslichtunterdrückung) auf Chipebene unterdrückt werden. Hingegen müssen die Messwerte bei Temperaturveränderungen durch geeignete Softwarerouti-nen, je nach Genauigkeitsanforderungen, korrigiert werden. Oftmals reicht es aus, mit einer höheren Messwertintegration zu arbeiten und entsprechende Korrekturfaktoren zur Temperaturkompensation zu verwenden.
Videos zum Thema ToF
Time-of-Flight Anwendungsgebiete
![Automotive]()
Automotive
![Transportwesen]()
Transportwesen
![Personenzählung]()
Personenzählung
![Objekterkennung]()
Objekterkennung
![Steuerung]()
Steuerung
![Sicherheit]()
Sicherheit
![Automatisierung]()
Automatisierung
![Medizin]()
Medizin
![Haushalt]()
Haushalt
![HCI]()
HCI
![Messtechnik]()
Messtechnik
![Viele mehr]()
Viele mehr






















 Automotive
Automotive
 Transportwesen
Transportwesen
 Personenzählung
Personenzählung
 Objekterkennung
Objekterkennung
 Steuerung
Steuerung
 Sicherheit
Sicherheit
 Automatisierung
Automatisierung
 Medizin
Medizin
 Haushalt
Haushalt
 HCI
HCI
 Messtechnik
Messtechnik
 Viele mehr
Viele mehr